
The old song tells us that leg bone is connected to the hip bone how are we to know if the articulated cam can connect to the brushless motor? There are, sadly, no songs designed to tell us how to build robots. Luckily CMU’s Ruta Desai has us covered.
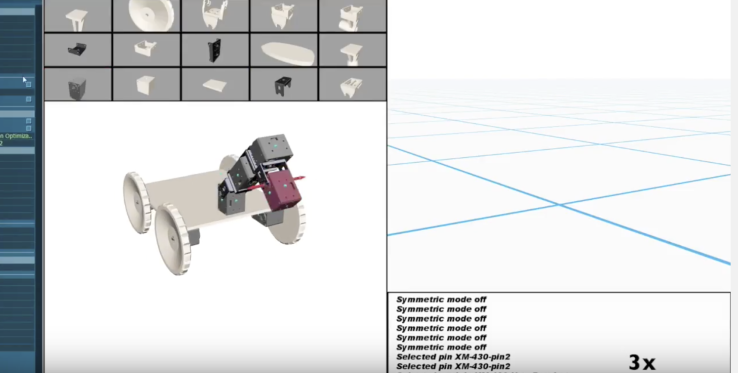
His project, “Computational Abstractions for Interactive Design of Robotic Devices,” is essentially a robotics toolkit. You see a set of parts that you can drag and drop to connect together and a complex physics engine ensures that wheels go where they work the best and motors are connected properly. This means you can’t create a robot that will fall over as soon as it moves forward. The tool also recommends parts to add to your robot to make it work better or be more structurally sound.
“The process of creating new robotic systems today is notoriously challenging, time-consuming and resource-intensive,” said co-creator of the project Stelian Coros. “In the not-so-distant future, however, robots will be part of the fabric of daily life and more people — not just roboticists — will want to customize robots. This type of interactive design tool would make this possible for just about anybody.”
In short this project makes it easier to put together the building blocks of real robotics and simulate what will happen when you activate the motors and sensors. In one test they created a robotic puppy that, after simulation, they “discovered could only walk forward and not sideways.” They tweaked it a bit and then built the project, finding they now had a puppy that could walk sideways.
It’s sort of like Scratch for robots, say the researchers.
“Our work aims to make robotics more accessible to casual users,” said Coros. “This could accelerate the adoption of robots in everyday life.”




 steals Dogecoin’s thunder")







